
在磁悬浮转子不平衡振动控制的相关研究基础上,阐述了磁悬浮转子不平衡振动的产生原因、控制原理以及处理方法,讨论了基于轴承电磁力最小和转子振动位移最小这2种控制策略的不平衡振动控制方法,并介绍了该技术在旋转机械中的典型应用案例,最后展望了磁悬浮转子不平衡振动控制研究的未来方向。
由于设计和加工缺陷、材质不均匀、热变形等原因使得转子不可避免地存在质量不平衡,从而会产生与转速同频的离心力,该离心力与转子转速平方成正比且使转子产生振动。当旋转机械高速运转时,微小的残余不平衡质量也会给系统带来严重影响。据相关统计,旋转机械故障中约三分之一来自转子不平衡,因此,转子的动平衡以及不平衡振动控制技术对于高速旋转机械具有非常重大的意义。
传统结构轴承作为支承时不具备主动控制特性,由其支承的转子只能在实际运行前进行离线动平衡,而且转子经过动平衡后仍存在残余不平衡量,当转子因负载变化或生锈等原因导致不平衡情况发生改变时,动平衡将失效。磁轴承的刚度相对于传统结构轴承较小且悬浮气隙较大,当转子不平衡力较大时,转子振动会更加剧烈;但磁轴承控制参数与控制电流可调,使其具备实时主动控制能力,为转子的不平衡振动控制提供可能。
本文基于大量文献调研,在磁悬浮转子不平衡振动控制发展、研究现状、算法分类等方面展开讨论,并提出了未来可能的研究方向。
1、磁悬浮转子系统简介
磁悬浮柔性转子系统是典型的机电一体化系统,包括控制器、D/A转换模块、功率放大器、转子、定子、电涡流位移传感器和A/D转换模块,典型的磁悬浮转子系统结构如图1所示。磁悬浮转子的闭环控制系统原理如图2所示:电涡流位移传感器检测转子相对于参考位置r的偏移e,经A/D转换后作为数字量输入到控制器,控制器经过相应的控制算法运算输出控制信号u,经 D/A转换后输入到功率放大器,功率放大器产生控制电流i并使转子稳定在平衡位置。
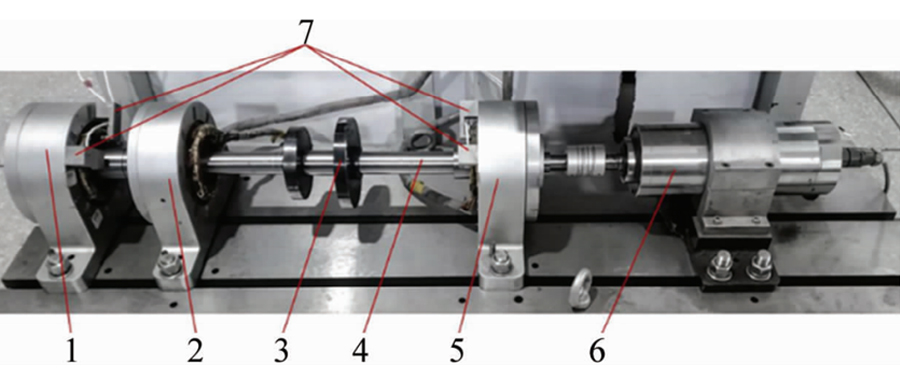
1—非驱动端径向磁轴承;2—激励磁轴承;3—盘片;4—转轴;5—驱动端径向磁轴承;6—电动机;7—位移传感器。
图1 典型的磁悬浮转子系统结构
Fig.1 Typical magnetic suspension rotor system structure
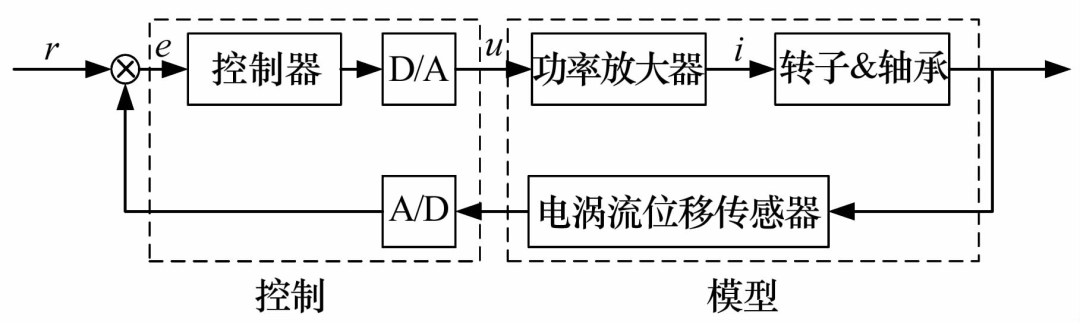
图2磁悬浮转子控制系统原理图
Fig.2Principle of magnetic suspension rotor control system
2、磁悬浮转子不平衡控制方法
目前,磁悬浮转子不平衡振动控制策略有轴承电磁力最小控制和转子位移最小控制这2种。
轴承电磁力最小控制也称为自动平衡(Auto Balance),即通过一定的滤波算法将反馈位移信号中的不平衡量滤除,降低控制电流中不平衡同频分量的幅值以减弱磁轴承的主动控制作用,从而使转子尽可能地绕其惯性主轴转动,此时转子的不平衡控制力最小。通过对转子的不平衡力进行控制,可以使其自由地绕惯性主轴旋转,减小不平衡力的同时消除传递至支承基础的同频振动力。有效利用不平衡力控制算法减小转子的同频振动力,对提高磁轴承系统性能及可靠性,降低磁轴承功耗等均有重要意义。
转子位移最小控制也称为不平衡补偿(Unbalance Compensation),即通过一定措施或补偿算法增大控制电流,从而增强磁轴承的主动控制作用,增加系统动刚度,使转子尽可能绕其磁轴承定子的几何中心转动,以实现减小转子位移振动的目的,此时转子振动位移最小。利用不平衡位移控制算法减小转子的不平衡位移,对增加磁轴承动态刚度,提高系统输出精度等具有重要意义。
上述2种振动补偿所实现的目的和达到的效果相反,也就是说在主动磁轴承系统中不能同时实现惯性力最小和位移最小。如图3所示,2种不平衡控制策略的区别在于虚线框中的不平衡滤波器或补偿器在磁悬浮转子控制框图中的位置,2种控制策略分别在控制器前、后引入控制,事实上针对2种控制策略所设计的控制算法大多也是在虚线框内进行。
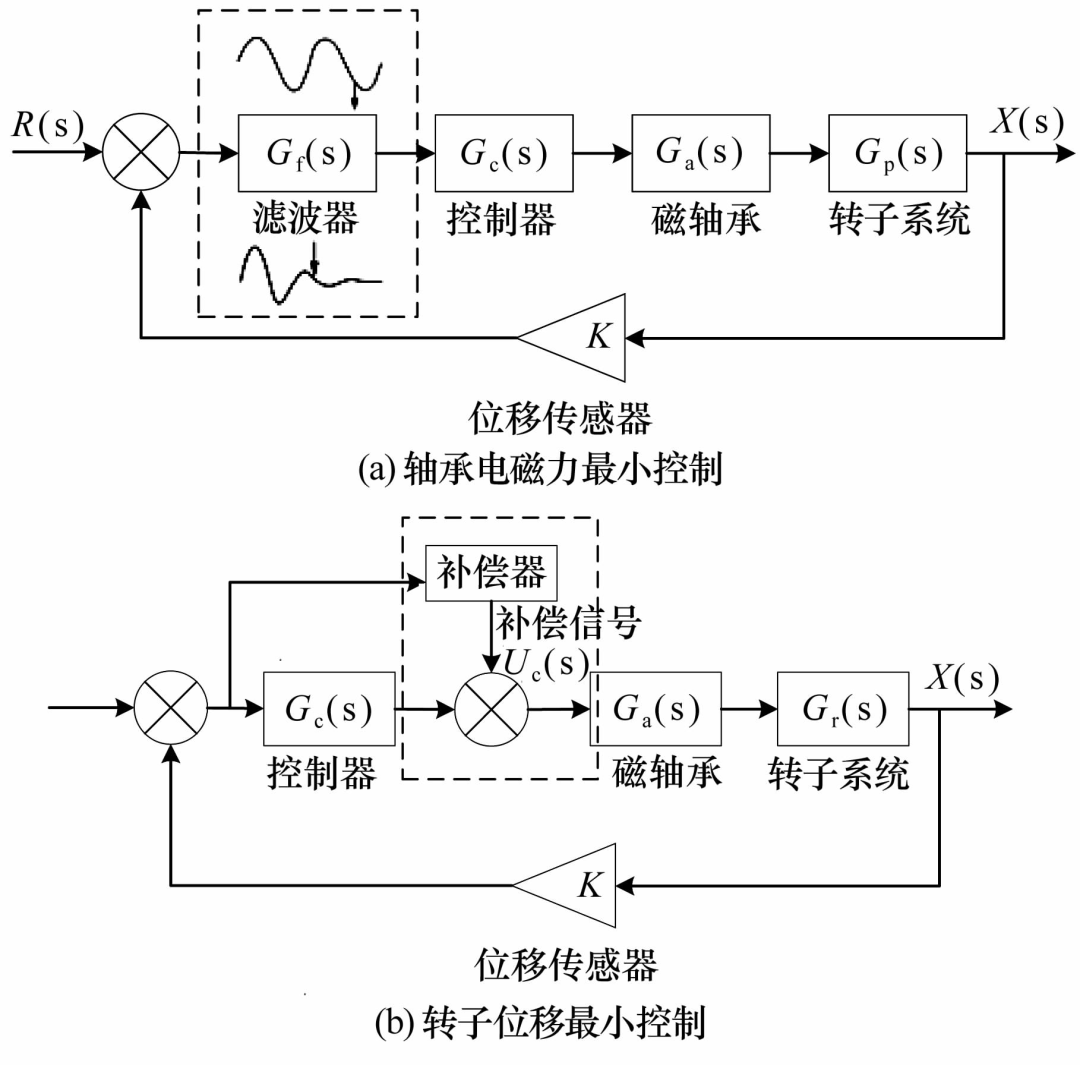
图3 磁悬浮转子不平衡控制原理
Fig.3 Schematic diagram of unbalanced control for magnetic suspension rotor
2.1 轴承电磁力最小控制
按照抑制分量的不同,轴承电磁力最小控制方法可以分为2种:1)同频力抑制,只抑制转子不平衡带来的振动力;2)谐波力抑制,在抑制转子不平衡带来的振动力的同时,还抑制传感器谐波噪声等带来的谐波振动力。
2.1.1 同频振动抑制
同频振动抑制又有2种途径,一种是直接去除同频量或谐波成分,另一种是识别不平衡量后主动改变控制量。
对于直接去除同频量或谐波成分的途径,主要有广义陷波器、最小均方( Least Mean Square,LMS)算法等。广义陷波器由于结构简单而得到了广泛研究,1996年,文献[9]提出了一种结构如图4所示的广义多变量陷波器抑制不平衡振动,其在通用陷波器中插入了一个灵敏度调节矩阵T以调整系统极点的位置,从而保证系统的稳定性。文献[10]提出了基于相移通用陷波反馈控制的同频电流抑制方法,可有效抑制控制器、功放系统和感应电动势产生的同频电流。为了同时对电流刚度和位移刚度进行补偿,文献[11]提出了将滑模观测器和陷波器结合的方法抑制不平衡振动,而且无需区分电流刚度和位移刚度,也无需考虑功放的低通特性。文献[12]针对主被动磁悬浮转子的质量不平衡以及被动磁轴承中心偏移导致的同频振动力,提出了一种基于位移陷波加前馈补偿的自动平衡控制方法。
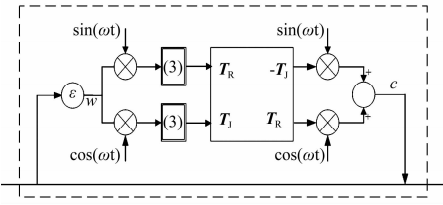
图4 基于广义陷波器的不平衡振动抑制
Fig.4 Unbalanced vibration suppression based on generalized notch filter
20世纪80年代,自适应滤波算法获得蓬勃发展,起初在噪声消除方面应用广泛。LMS算法由于原理简单,自适应、抗干扰能力强,收敛性好等优点获得了广泛应用,并于20世纪90年代应用于磁悬浮转子不平衡振动控制领域。LMS算法实际上是一种离散自适应陷波器,其原理如图5所示。文献[14]在2009年提出了基于LMS算法的实时变频切换控制策略,降低了周期性不平衡激振力;随后,为兼顾稳定性和收敛速度,提出了变步长LMS算法并在不同定转速试验中取得了较好效果,而将H∞算法与自适应步长LMS算法相结合实现实时最小惯性力补偿,则提高了整个系统的鲁棒稳定性和抗干扰性能。另外,文献[17]提出了一种基于LMS算法的自适应前馈补偿,抵消了功放低通特性的影响,其方法原理如图6所示。
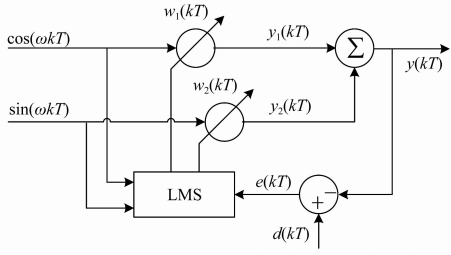
图5 LMS算法原理
Fig.5 Principle of LMS algorithm
2015年,文献[18]将电动机传动控制中同步旋转坐标系(Synchronous Rotating Frame,SRF)变换的方法应用于磁轴承系统,其控制原理如图7所示,相当于一种新型的陷波滤波器,通过与控制器串联工作在转子低速旋转时有良好的同步抑振性能。
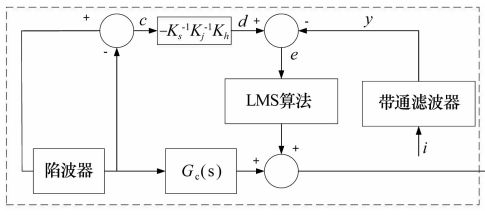
图6 带比例前馈补偿的自动平衡方法
Fig.6 Automatic balancing method with proportional feedforward compensation
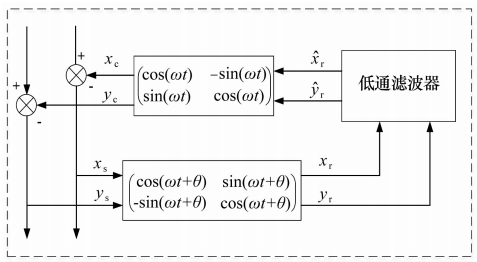
图7 基于SRF变换的控制原理图
Fig.7 Control schematic diagram based on SRF
对于识别不平衡量后主动改变控制量的途径,文献[19]设计了自适应自平衡控制策略,通过识别惯性轴与几何轴的位移和夹角进行补偿;文献[20]设计了滑模扰动观测器对不平衡力和不平衡力矩进行观测并补偿,有效减小了同频振动。
2.1.2 谐波振动抑制
谐波振动抑制方法也可分为2种途径,一种是利用多个滤波器分别抑制各次谐波,另一种是设计自适应算法统一抑制。
对于分别抑制各次谐波的途径,最典型的就是采用多个陷波器:文献[21]将多个相移陷波器并联实现了可变转速下的电流谐波抑制;文献[22]进一步给并联的多个陷波器分配了不同的相移角,实现了全转速的振动控制;文献[23]将多个准谐振控制器并联并引入阻尼因子,实现了稳定性与动态性能之间的良好平衡;文献[24]则将多个陷波器串联,同样实现了谐波振动的抑制。
对于统一抑制的途径,文献[25]提出了一种非线性自适应方法估计谐波干扰的各傅里叶级数,可以精确补偿位移刚度,其控制原理如图8所示,在低转速下取得了较好的振动抑制效果。
另外,文献[26]提出了一种基于频域自适应LMS算法的谐波振动抑制方法,对每个权值设置相应的步长并实时调整,在保证稳态精度的同时提高了收敛速度。文献[27]提出了一种新的积分自适应观测器(图9),用于识别传感器误差的直流和谐波含量并同时估计系统状态,试验表明当系统同时受到测量误差和不平衡干扰时能有效减小位移和电流幅值。文献[28]提出了一种针对低次主导谐波的通用选择分数阶重复控制方法,实现了任意转速下快速高精度的谐波电流抑制。

图8 非线性自适应谐波振动控制框图
Fig.8 Block diagram of nonlinear adaptive harmonic vibration control
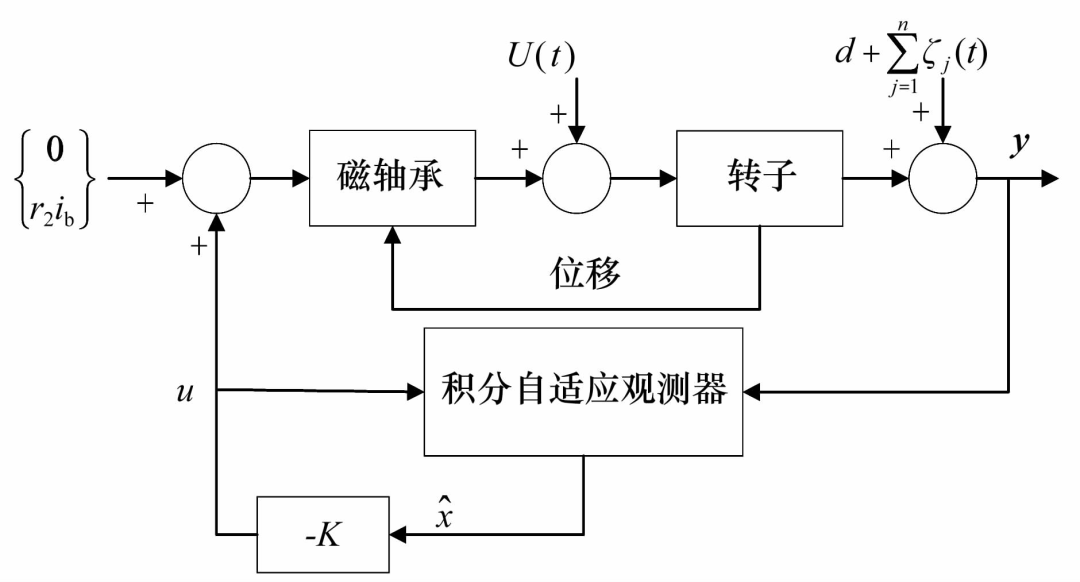
图9 基于积分自适应观测器的谐波振动抑制
Fig.9 Harmonic vibration suppression based on
integral adaptive observer
2.2 转子位移最小控制
相对于轴承电磁力最小控制而言,转子位移最小控制的复杂度较高,主要体现在实际系统不平衡力的大小和相位难以估计。不平衡力与转子转速ω、不平衡质量m 、偏心距e等参数有关,可表示为F(t)=meω2sin(ωt+φ),由于转子转速ω通常已知,如何得到不平衡力的幅值meω2和相位φ成为最小位移补偿至关重要的部分。
2.2.1 转子不平衡补偿幅值估计
对于转子不平衡补偿信号的幅值估计,目前常用的算法有迭代算法、影响系数法以及基于模型辨识的方法等。
1983年,文献[29]最早开始磁悬浮转子不平衡振动控制研究,利用最小二乘法建立磁轴承系统响应与控制量之间的联系,获取影响系数矩阵,利用磁轴承作为不平衡振动控制作动器,采用开环前馈的方法抑制振动。其基本原理为
y=T(ω)u+d,
式中:y为系统位移响应同频傅里叶系数;T为影响系数矩阵;u为不平衡控制同频傅里叶系数;d为不平衡力同频傅里叶系数。理论上,只需得到各转速下转子不平衡力的分布以及对应的影响系数矩阵,即可计算对应转速下所需控制量。但此方法必须要先获得转子当前转速信息及不平衡激振力分布等先验信息,对影响系数矩阵的精度有比较高的要求。
文献[31]提出一种刚性轴不平衡抑制方法,基于之前的磁悬浮转子模态研究,通过如图10所示的全息谱方法对转子初始不平衡进行分析,将力不平衡与力偶不平衡分离研究,通过一阶、二阶振型获得不平衡相位、增益信息,然后施加反相电磁力抑制转子不平衡。文献[32]提出一种同时估计动态参数和不平衡量的辨识算法,该算法主要基于转子的模型,具有较强的鲁棒性,算法结果与试验过程中磁轴承转子的动态参数一致。基于模型的控制算法虽然能够获得较好的振动控制效果,但获取精确不平衡力模型的难度较高,且控制效果依赖于模型的精确度。
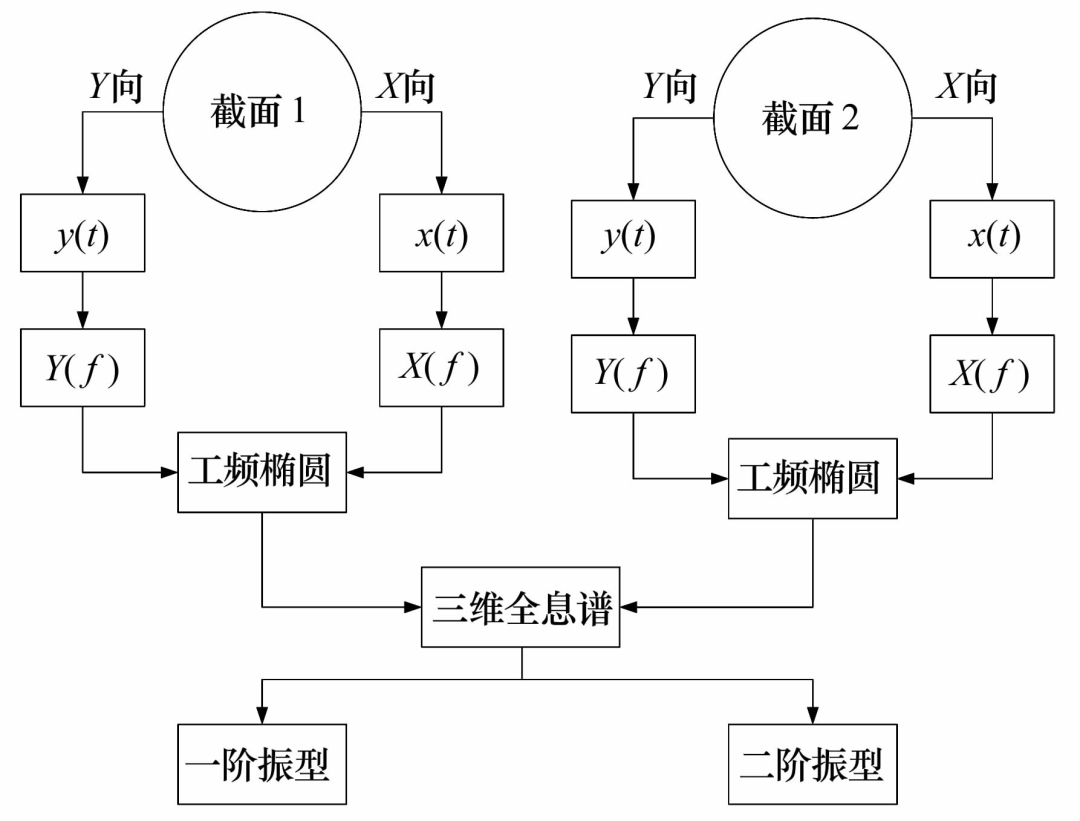
图10 磁悬浮转子全息谱原理
Fig.10 Holographic spectrum principle of magnetic suspension rotor
为避免过于依赖模型精确度的问题,通过自适应算法得到不平衡幅值估计。文献[33]提出一种基于扩展影响系数法的磁轴承转子位移跳动检测方法,解决了之前补偿算法中需要对传感器进行3点设置以及补偿失效的问题,能够自适应识别并补偿转子跳动。文献[34]对影响系数法进行优化,提出了一种广义影响系数法并针对不平衡幅值进行了测试,在每次试加质量后判断是否能够平衡,通过反复试加以找到最优解,在磁悬浮转子高转速工况下能够得到比传统影响系数法更准确的结果。文献[35]则提出了一种基于主动磁轴承的影响系数法,通过主动磁轴承对转子校正面各试加一次与位移同频同相电流,代替了传统动平衡的配重与去重,其补偿方法如图11所示,通过计算得到转子不平衡振动补偿电流,从而实现转子正常运行中的在线不平衡补偿。
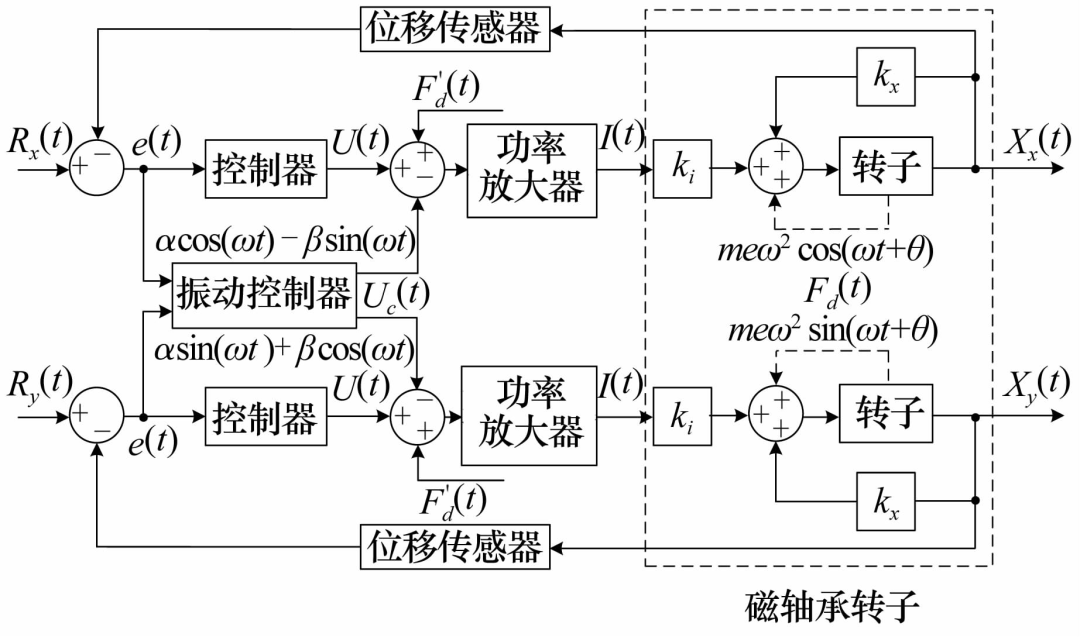
图11 磁悬浮转子在线动平衡方法
Fig.11 Online dynamic balance method of magnetic suspension rotor
影响系数法可以在一定程度上看作试加质量的反复迭代求解,对于转子不平衡力的幅值还有另外的方法进行求解。
文献[36]提出了一种可变步长( Variable Step Size,VSS)的迭代算法,其是对定步长( Constant Step Size,CSS)迭代算法的延伸优化,控制方法如图12所示,通过信号处理模块、迭代模块和输出模块不断的迭代计算以找到不平衡力幅值的准确解。2种算法的对比结果表明,VSS算法具有更好的准确度和收敛速度,当转速升高且超过临界值时CSS算法失去了补偿效果,而VSS算法仍可进行补偿,能够更好地抑制转子跨阶时的不平衡振动。
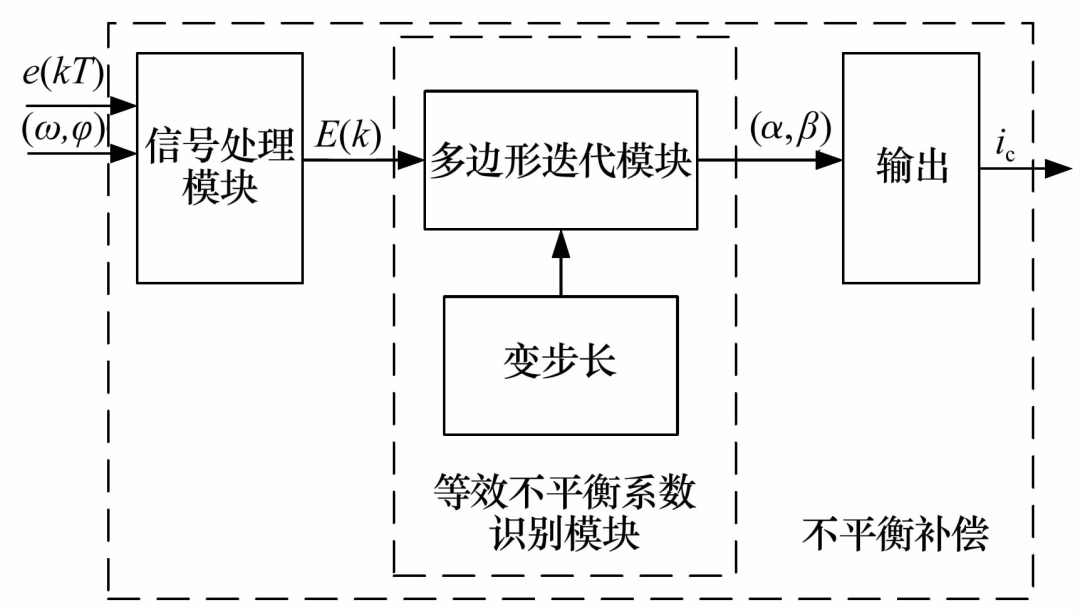
图12 可变步长迭代算法的不平衡振动控制
Fig.12Variable step size iterative algorithm for unbalanced vibration control
文献[37]提出了一种寻找不平衡质量位置的算法,通过如图13所示的补偿模块将转子转速作为输入,根据实时提取的转子不平衡质量的大小和位置产生相应的控制信号,从而抑制不平衡振动。由于该不平衡质量与转子转速无关,该算法也适用于变速转子。
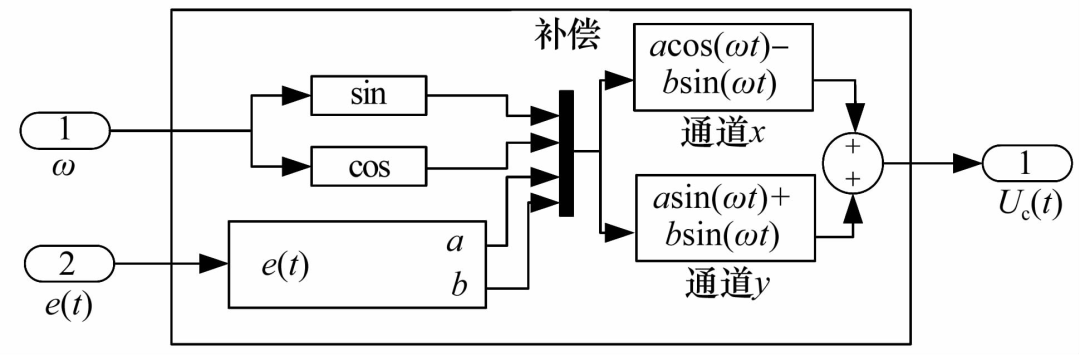
图13 不平衡质量寻找算法的振动控制
Fig.13 Unbalanced mass seeking algorithm for vibration control
2.2.2 转子不平衡补偿相位估计
转子不平衡补偿信号的相位决定了不平衡补偿力的方向,理想状态下,补偿力应与不平衡力方向相反大小相等。由于不平衡力作用在磁悬浮转子上使转子产生振动,磁悬浮转子不平衡振动的同频位移为正弦信号,形如X(t)=Asin(ωt+φ)。因此,现有方法多采用参考信号法估计不平衡补偿相位,通过位移传感器获取转子实时位移信息,提取由不平衡振动产生的同频振动位移,以此为参考信号从而获取相位信息。目前采用较多的算法有LMS算法、陷波器滤波、基于傅里叶系数的迭代逼近算法,滤波算法等。
文献[26]提出了一种基于频域自适应的LMS算法,单一通道不平衡振动自适应控制框图如图14所示,其以谐波振动作为输入,参考输入为引入的与传感器跳动具有相同分量的正弦信号,仿真结果表明该方法能有效提取磁悬浮转子不平衡同频振动信号。
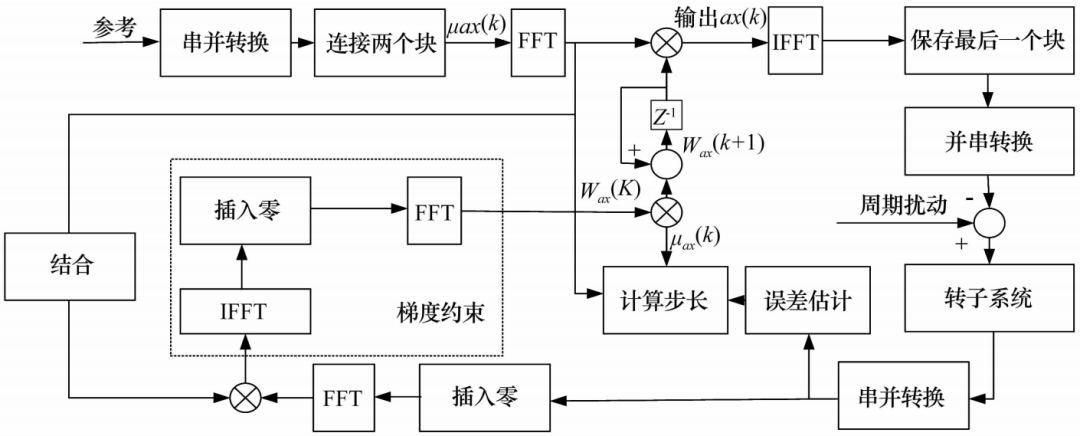
图14 频域自适应LMS算法
Fig.14 Frequency domain adaptive LMS algorithm
文献[38]提出了一种基于LMS算法的快速相位追踪算法,其补偿算法框架如图15所示,将PID和可变步长LMS算法控制策略结合,在过滤器中补加追踪算法直到转子速度达到一定值,在DSP架构下的实时试验验证了该算法的相位跟踪性能。
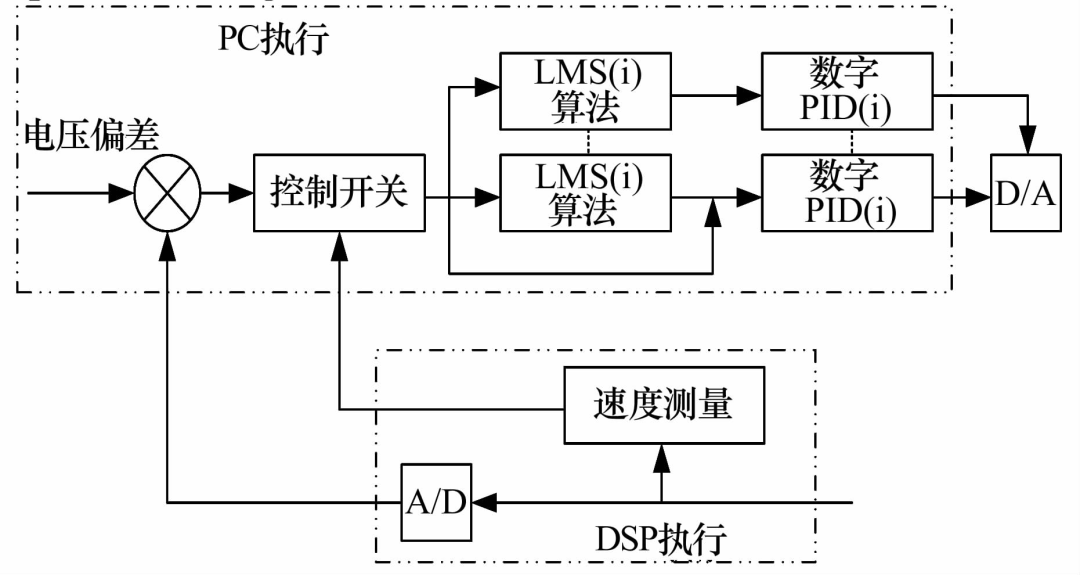
图15 PID和可变步长LMS算法结合控制策略
Fig.15 Combined control strategy of PID and variable step size LMS algorithm
LMS算法在转子不平衡补偿相位估计中应用较多,可以理解为对特定频率信号的一种陷波算法,除此之外,还有其他的滤波算法用于磁轴承转子不平衡的补偿相位估计。文献[39]利用卡尔曼滤波方法提取不平衡位移量,根据不平衡位移经线性高斯状态反馈控制器提高刚度,减小振动。文献[40]将广泛应用于电动机控制的同步旋转坐标系(SRF)应用于磁轴承控制,采用如图16所示的前馈控制回路,通过单相的位移误差信号构造2路正交信号作为SRF变换的输入,将同频位移误差转变为直流量,从而对变换后的直流误差进行无静差的跟踪控制。文献[41]提出了一种相位补偿方法以提高柔性转子在第一弯曲临界转速附近的阻尼水平,其在控制器中加入相位补偿算法使得转子系统整体的阻尼增加,仿真和试验结果表明相位补偿能够明显提高转子的一阶弯曲模态阻尼,有效抑制转子的共振振动,使转子顺利通过一阶弯曲临界转速,实现超临界运行。
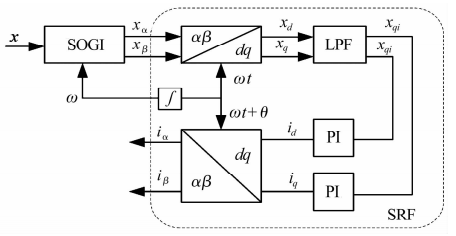
图16 SOGI-SRF补偿器结构图
Fig.16 Structure diagram of SOGI-SRF compensator
2.3 算法切换控制
轴承电磁力最小算法与转子位移最小算法是2种完全相对的控制方法,各有优势,也各有缺陷。轴承电磁力最小控制算法存在低转速时闭环系统不稳定的问题,转子位移最小算法虽然能够实现转子的高精度旋转,但在高转速工况下容易致使功放饱和且放大转子振动相位与不平衡力的相位差,通常适用于转速较低的情况。对于2种算法的切换控制,有一些学者展开了研究:文献[42]利用广义根轨迹分析了引入补偿后系统的闭环稳定性,通过切换引入补偿的极性穿越临界转频,从而实现引入LMS反馈补偿后全转速闭环稳定;文献[43]提出了一种新型多谐振控制器,可在不同转速下实行分段切换策略,实现抑制基波和谐波电流;文献[44]则提出了基于极性切换陷波器的方法。
2.4 智能控制算法
近年来,在前人研究成果的基础上,一些新兴算法也被提出,如迭代学习算法、神经网络算法等智能算法以及多算法融合控制等。文献[45]针对磁悬浮转子提出基于学习策略的不平衡补偿PID控制策略,试验结果表明该算法在较大转速范围内的扰动跟踪效果良好,而通过采用不同的方法进行分析,该文献认为相对于采用遗忘因子,使用非因果低通滤波器的效果更好。
文献[46]利用深度学习理论设计了一种补偿控制器并将其加入PID反馈控制中,其采用具有2个隐含层的深度神经网络建立了补偿控制器的结构,通过设计的运行算法仿真了不同控制器在固定转速下的不平衡振动控制,通过不平衡振动分析和控制电流分析验证了所提控制器的控制效果,但该算法的试验效果还有待进一步验证。
3、研究方向与展望
经过众多学者多年的研究,磁悬浮转子不平衡振动控制领域早已硕果累累,但仍然有以下几点待开展研究。
3.1 转子跨阶时的不平衡补偿
当转子跨越临界转速(跨阶)时,根据受迫振动响应规律可知,此时转子的振动幅值与相位都会发生剧烈变化,且由于转子发生弯曲形变,转子的不平衡状态会发生改变,现有的算法如自适应迭代算法、影响系数法等可能会失效。而且,目前大多数研究都是针对刚性转子或跨阶后处于稳定状态的转子。如何设计控制器,使不平衡补偿在转子跨阶时也能有效运行,降低转子在跨阶时的振动,辅助转子跨越临界转速,需进一步开展研究。
3.2 基础激励等外界干扰时的不平衡振动控制
当转子受到如基础激励等外界干扰时,由叠加原理可知转子的振动是外界激励响应与不平衡响应的叠加,转子的不平衡响应可能被外界干扰产生的振动所覆盖,特别是当外界激励与转速同频时,转子的不平衡振动信息难以提取,如何提取该状态下的转子不平衡振动信息,实现不平衡振动的控制也有待研究。
3.3 磁轴承+辅助支承时的不平衡振动控制
传统意义上的磁悬浮转子不平衡补偿多是考虑磁轴承单独支承的情况,对于磁轴承为主要支承,其他支承方式为辅助支承情况下的不平衡振动控制,尚未见相关研究。例如,近年来兴起的磁+气混合轴承支承,转子不仅受到电磁力,还受到动压效应产生的气浮力,转子的不平衡周期振动在受到控制器周期控制力的同时,还受到由于气隙周期变化产生的周期性波动气浮力的影响,对于此类支承方式下的转子,首先需要通过研究其动力学特性获取转子的不平衡振动特征,然后进行不平衡振动的控制,这一研究仍待开展。
3.4 智能控制算法与现有算法的结合
智能控制算法在磁轴承上的应用还处于起步阶段,随着智能控制理论的进一步发展,将智能控制引入磁悬浮转子不平衡振动的研究对提高磁悬浮转子性能具有重要意义。目前,这个方向的研究内容在于如何结合现有的控制算法,利用机器学习神经网络等智能算法增强不平衡振动控制算法的自适应能力与鲁棒性。
4、磁悬浮转子系统简介
多年来,经过国内外众多学者在磁悬浮转子不平衡振动控制方法上的研究,取得了许多成果,大大拓展了磁轴承在现代工业技术、医疗器械以及航空航天等领域的应用范围。本文针对磁悬浮转子的不平衡振动控制问题,介绍了国内外的研究发展情况,对不同的控制算法进行分类,综述了部分学者的研究成果并讨论了各方法之间的相同与不同之处,这些成果基于不同的控制算法以及控制策略,针对不同的实际问题,算法间既有相通之处,又有各自的应用场合与优势。在实际的应用中,如何针对具体的控制对象研究不同的控制方法,以实现期望的效果,仍然是一个巨大的挑战。
(参考文献略)
文章发表于2022年3期《轴承》——磁力轴承专题


轴研所公众号 轴承杂志社公众号
Copyright © 2019 洛阳轴承研究所有限公司, All Rights Reserved 备案号:豫ICP备18028303号-3
豫公网安备 41030502000528号
营销热线
0379-64367521
0379-64880626
13693806700
0379-64886322
0379-64881181
 返回
返回